Что такое контроллер для светодиодной ленты и как его выбрать
Содержание:
- Средние цены
- Как выбрать контроллер для светодиодной ленты
- Принцип работы микроконтроллера
- Назначение реверсивной или реверсивно-селективной рукояти
- Порт UART в полетном контроллере
- Как правильно приобрести контроллер
- Подбор по мощности массива солнечных батарей
- Контроллер тепловоза
- Выбор ПЛК
- В чем особенность буст контроллера
- Устройства на микроконтроллерах
- Типы ПЛК
- разница написания КОНТРОЛеР и КОНТРОллЕР? Как понять?
- Установка драйвера на сетевую карту в Windows 10, 8, 7
- Что это такое?
- Гироскоп и акселерометр полетного контроллера
- Типы корпусов микроконтроллеров
- Виды контроллеров
- Языки программирования ПЛК
Средние цены
Для того, чтобы понять в каком ценовом диапазоне находятся МРРТ контроллеры различных производителей, можно рассмотреть стоимость моделей, приведенных выше, это:
- КЭС 100/20 MPPT – от 10000,00 рублей;
- КЭС DOMINATOR MPPT 250/60 – от 40000,00 рублей;
- Epsolar MPPT TRACER-2215BN 20А 12/24В – от 9000,00 рублей;
- IT6415ND 60A 12V/24V/36 В – от 30000,00 рублей.
- Victron BlueSolar 100/15 12/24В 15А – от 11000,00 рублей;
- Victron BlueSolar 150/70 12/24/48В 70А – от 55000,00 рублей.
Как видно из приведенных цифр, наиболее дешевые, это модели китайского производства, а наиболее дорогие – европейских производителей.
Продукция отечественных предприятий несколько дороже устройств, произведенных в Китае, но дешевле изготовленных в Европе.
Как выбрать контроллер для светодиодной ленты
При выборе контроллера
для цветной светодиодной ленты необходимо учесть ряд его технических
характеристик:
- Вольтаж.
- Мощность.
- Сила тока.
- Исполнение корпуса.
Вольтаж контролирующего
устройства должен точно соответствовать аналогичному параметру лед-ленты. Как
правило, это 12 или 24 вольта. Их значения можно найти в описании. Немного
сложнее дело обстоит с мощностью – ее нужно рассчитать. Она должна равняться
суммарному значению для всех лэд-элементов. Например, если один метр
светодиодной ленты потребляет 4 Вт, а общая длина = 5 метрам, то общее значение
будет 20 Вт. Именно такое значение должна иметь мощность самого блока.
Аналогичным образом
ведется расчет для силы тока светодиодной ленты. Так, если метр ее длины
потребляется 1,2 А, значит, при протяженности в 5 м, ее общий показатель будет
равен 6 А
Не менее важно выбирать блок контроля по типу корпуса. Если его
монтаж планируется на улице или в сыром помещении, то он должен иметь
соответствующую степень защиты
При подключении дополнительного витка светодиодной ленты для синхронной работы от уже установленной с контроллером потребуется монтировать усилитель (между двумя лэд-полосками) и блок питания (от ближайшей розетки). Это позволит установить набор разноцветных led-светильников, сэкономив на прокладке кабеля. При этом все элементы цепи должны иметь соответствующий номинал по току, напряжению и мощности.
Какие ошибки могут быть допущены при
выборе
Среди наиболее распространенных
ошибок, которые нужно избегать при выборе контроллера для светодиодной ленты,
можно выделить:
- Не учитывается суммарная мощность лед-элементов.
- Неправильный монтаж блока контроллера за навесным потолком при использовании пультов с ИК-портом.
- Установка управляющих устройств для разных комнат с одной частотой (характерно для какого-то конкретного производителя). При включении с пульта будут запускаться сразу несколько областей. Избежать проблемы можно, используя разные каналы или модели разных линеек для разных зон.
Принцип работы микроконтроллера
Несмотря на сложное устройство принцип работы микроконтроллера очень прост. Он основан на аналоговом принципе действия. Система понимает лишь две команды («есть сигнал», «нет сигнала»). Из этих сигналов в его память вписывается код определенной команды. Когда МК считывает команду, он ее выполняет.
В каждом из МК прописаны свои базовые наборы команд. И только их он способен принимать и выполнять. Сочетая отдельные команды между собой, можно написать уникальную программу, по которой будет работать любое электронное устройство именно так, как требуется.
В зависимости от содержащихся в МК набора программ, они делятся на:
Большинство контроллеров содержит RISC набор. Объясняется это тем, что такой МК проще изготовить, он дешевле и больше пользуется спросом у разработчиков электронной техники.
Назначение реверсивной или реверсивно-селективной рукояти
Что касается наиболее важной рукояти — реверсивно-селективной, то она соединяется с таким же валом. При помощи шариковых подшипников он насаживается сверху на тормозной вал
Особенность конструкции заключается в следующем. Реверсивно-селективный вал, насаженный на тормозной вал, соединен со вторым реверсивно-селективным валом при помощи зубчатой передачи. Второй вал насаживается на главный. Что касается позиций рычага этого типа, то он имеет девять позиций. Одна из них нулевая, и по 4 позиции в каждом направлении.
При переводе «Вперед» против часовой стрелки — 4 позиции, при переводе «Назад» по часовой стрелке — еще 4. При перемещении рычага вперед, в первую позицию, будет включаться положение «М», соответствующее работе в тяговом режиме. Три следующих позиции будут соответствовать разным схемам соединения тяговых двигателей в тормозном режиме работы. Это будет параллельное соединение «П», последовательно-параллельное «СП» и последовательное «С». Что касается положений при перемещении рукоятки назад, то все они будут аналогичным этим.
Порт UART в полетном контроллере
Аббревиатура UART с английского расшифровывается как (Universal Asynchronous Receiver/Transmitter) — универсальный асинхронный приемник/передатчик.
К порту UART подключаются различные периферийные устройства, такие как, приемник, различная телеметрия и так далее. У порта есть два контакта для обмена данными — прием и передача.
На фото ниже вы можете увидеть пример UART порта и их настройки в Betaflight, точнее, вы можете назначить в этой вкладке порту любое устройство, которое поддерживает обмен данными:
Сколько бывает портов UART на полетном контроллере?
UART портов много не бывает — чем больше, тем более гибко можно будет настраивать ваш квадрокоптер, а также они будут дублировать друг друг в случае поломки.
Но само количество портов зависит от размеров платы полетного контроллера и от того, как расположены на ней компоненты, а также от типа процессора, который использует ПК. 3-е и 4-е поколение полетных контроллеров (F3-F4) имеют от 3 до 5 UART, а 7-е поколение — 7 и более. Оно и понятно, слабый процессор не сможет физически обрабатывать столько периферии.
| F1 | F3 | F4 | F7 |
| 2 UART | 3-5 UART | 3-6 UART | 7+ UART |
Инвентированный сигнал и UART
Инвентированный сигнал поддерживают полетные контроллеры 3-го и 7-го поколения, а вот 1-е и 4-е поколения не могут.
Передатчики FrSky с протоколом работы SBUS и SmartPort на выходе инвертируют свой сигнал, и их могут обработать только процессоры нового поколения, такие установлены на 7-м и 3-м поколении (F3 и F7), так как у них уже есть встроенный инвертор.
А вот для устаревших поколений (F1 и F4) нужно перед портом UART устанавливать инвертор, который будет обрабатывать и преобразовывать сигнал и передавать его уже в UART. Хотя в некоторых полетных контроллерах F4 производители сразу устанавливают инверторы для SBUS и SmartPort, пилоту можно сразу подключать приемник к ПК.
Если у вас закончились UART порты, то можно воспользоваться функцией в Betaflight «soft-serial», благодаря которой можно создавать виртуальные UART. С помощью ПО Betaflight создается эмуляция этого порта, как будто он есть физически, но на самом деле его нет. Также стоит отметить, что такой порт будет работать значительно медленнее, чем физический и он не подойдет для подключения приемника, например, так как такое замедление критично. Процессор тоже будет работать с повышенной нагрузкой.
Как правильно приобрести контроллер
Сейчас выбор этих устройств огромен, так что, не нужно бросаться не разобравшись в деталях на первые попавшиеся в интернете модели. Всемирная паутина не единственное место где можно приобрести подходящий контроллер. В реале, есть специализированные мастерские, которые позволяют вывести провода из блока управления под нужные покупателю функции.
Большинство плат управляющих устройств предлагают юзерам максимальный функционал, однако выводится он не полностью. К примеру, может быть такое, что отключена рекуперация либо не выведен реверс, либо круиз-контроль. Когда будете приобретать изделие в таких конторах, эти и другие функции можно вывести сразу, при этом вы отдадите за всё про всё вполне приемлемые деньги. Насчёт себестоимости расклад таков: есть различные ценовые сегменты для блоков управления, так сказать на любые запросы и любой кошелёк.
Например, в Москве, предлагается самая разнообразная продукция. Хотите подешевле? Нет проблем: управляющие устройства для внутреннего рынка КНР, изготовленные по принципу дёшево и сердито, разрабатываются для того, чтобы на электровелосипеде можно было просто ехать. Они идут в основном 2-х режимными, могут работать и с датчиками Холла, и без них.
Далее предлагаются экспортные варианты из Китая с подключаемыми дисплеями и беспроводным управлением. Заокеанские и немецкие изделия могут порадовать своим техническим совершенством тех пользователей, которым как говорится денег не жалко — эта продукция представляет линейку дорогих устройств управления для электробайков.
Подбор по мощности массива солнечных батарей
Основной параметр контроллера солнечного заряда это рабочее напряжение и максимальная сила тока, с которой может работать контроллер заряда
Очень важно знать такие параметры солнечных батарей, как:
-
Номинальное напряжение – рабочее напряжение контура солнечных батарей, замкнутого на нагрузку, т.е. на контроллер;
-
Напряжение открытого контура – максимальное достигаемое напряжение контура солнечных батарей, не подключенного к нагрузке. Также же это напряжение называется напряжением холостого хода. При подключении к контроллеру солнечных батарей, контроллер должен выдерживать данное напряжение.
-
Максимальная сила входного тока от солнечных батарей, сила тока контура солнечных батарей в режиме короткого замыкания. Этот параметр достаточно редко указывается в характеристиках контроллера. Для этого необходимо узнать номинал предохранителя в контроллере и посчитать величину тока короткого замыкания солнечных модулей в контуре. Для солнечных батарей ток короткого замыкания обычно всегда указан. Ток короткого замыкания всегда выше максимального рабочего тока.
-
Номинальный рабочий ток. Ток подключенного контура солнечных батарей, который вырабатывается солнечными батареями при нормальных условиях эксплуатации. Данный ток обычно ниже указанного тока в характеристиках для контроллера, так как производители, как всегда, указывают максимальную силу тока контроллера.
-
Номинальная мощность подключаемых солнечных батарей. Данная мощность представляет произведение рабочего напряжения на рабочий ток солнечных батарей. Мощность солнечных батарей, подключенных к контроллеру должна быть равна указанной или меньше, но никак не больше. При превышении мощности, контроллер при отсутствии предохранителей может сгореть. Хотя большинство контроллеров, естественно, имеют предохранители, рассчитанные на перегрузку в 10-20% в течение 5-10 минут.
Контроллер тепловоза
Контроллер машиниста тепловоза предназначается для ионного управления силовой установкой тепловоза. Если в случае электровоза переключение реверсивной рукояти меняет цепи управления, то для тепловоза перемещение такого рычага будет означать изменение направления движения.
Что касается конструкции, то контроллер собирается из сварного корпуса, стальной крышки, двух барабанов — главного и реверсивного. Кроме того, имеется реверсивного типа рукоять и штурвал. На валах этого контроллера также имеются кулачковые шайбы. При помощи этих шайб можно замыкать и размыкать контактные элементы в нужной последовательности.
Выбор ПЛК
Выбор платформы автоматизации
Выбор платформы определяет и весь ваш будущий выбор.
ПЛК является первым пунктом в выборе платформы.
Правильный выбор платформы позволяет минимизировать расходы жизненного цикла системы управления:
- склад запасных частей и сервисное обслуживание
- обучение и сертификацию обслуживающего персонала
- приобретение лицензий на средства разработки прикладного ПО
- интеграцию (бесшовная интеграция)
- миграцию (переход со старого оборудования на новое)
- программы и сикдки для ключевых клиентов
Определение количества точек ввода-вывода
Желательно максимально точно определить общее количество точек ввода-вывода (с учётом резервирования), чтобы подобрать ПЛК соответствующей производительности,
или заранее предусмотреть модель контроллера с большим запасом по расширяемости.
- Дискретные входы (стандартные и быстродействующие импульсные)
- Аналоговые входы для подключения датчиков:
- токовых (0..20мА, 4..20мА)
- «напряженческих» (-10..+10В, 0..+10В)
- термопар и термосопротивлений (способ подключения: 2-х, 3-х или 4-х проводное подключение)
- Дискретные выходы (мокрый контакт)
- Релейные выходы (сухой контакт):
- тип нагрузки (резистивная, индуктивная, резистивно-индуктивная)
- величина тока (в Амперах)
- напряжение (~220В, =24В)
- Аналоговые выходы:
- токовые (0..20мА, 4..20мА)
- «напряженческие» (-10..+10В, 0..+10В)
- Интерфейсы для подключения угловых или линейных датчиков скорости, положения (энкодеров, резольверов, синусно-косинусных)
Определение архитектуры системы управления
- Составить список объектов автоматизации (производственных площадок, цехов, участков, технологических линий, подсистем)
- Определиться с количеством ПЛК: если объекты управляются независимо друг от друга и вводятся в эскплуатацию поочередно, то можно предусмотреть для них
отдельные контроллеры - В зависимости от объёма и скорости обмена данными, территориального расположения объектов управления необходимо выбрать тип и топологию промышленной сети,
требуемое коммуникационное оборудование - Для минимизации длины кабельных соединений используются станции распределённого ввода-вывода
- Расписать точки ввода вывода по контроллерам, шкафам локального и децентрализованного ввода-вывода, определить количество и типы модулей ввода-вывода с
учётом запаса по свободным каналам ввода-вывода - В зависимости от направления обмена данными между ПЛК необходимо правильно выбрать конфигурацию Master – Slave (Ведущий – Ведомый): контроллеры типа Slave
не могут обмениваться данными друг с другом
Масштабируемость
Масштабируемость – это возможность подобрать промышленный контроллер оптимальной конфигурации под конкретную задачу (не переплачивая за избыточную функциональность),
а при необходимости расширения – просто добавить недостающие модули без замены старых.
Выбор блоков питания
Контроллеры подключаются к стабилизированным импульсным источникам питания. Необходимо аккуратно подсчитать суммарный ток, потребляемый всеми модулями
контроллера и подобрать блок питания с соответствующей нагрузочной способностью.
Пример последствий неправильного выбора блока питания
Выходные модули установки приготовления клея для варки целлюлозы иногда отключались и испорченный клей приходилось выбрасывать тоннами.
К финскому проекту ни у кого претензий не возникало. Заменили все модули ввода-вывода — не помогло. Грешили на случайные помехи из-за плохого заземления.
Оказалось, что в определённых ситуациях (как-бы случайно) срабатывало такое «большое» количество входов и выходов,
что суммарный потребляемый ими ток на мгновение превышал допустимый выходной ток блока питания и модули вывода отключались.
Заменили блок питания на более мощный и проблема была решена.
- Очень полезен программный симулятор, с помощью которого можно отладить программу без подключения к ПЛК
- Удобно, если для программирования ПЛК можно использовать стандартный ноутбук и стандартный кабель (USB или Ethernet)
- Проще найти программиста, если контроллер поддерживает стандартные языки программирования IEC61131:
- LD (Ladder Diagram) – графический язык релейной логики
- IL (Instruction List) – список инструкций
- FBD (Function Block Diagram) – графический язык диаграмм логических блоков
- SFC (Sequential Function Chart) – графический язык диаграмм состояний
- ST (Structured Text) – текстовый язык программирования высокого уровня
В чем особенность буст контроллера
Сначала нужно ознакомиться с модификациями устройств. Они представлены:
- электроника;
- механика.
Большей популярности и востребованности среди потребителей пользуются экземпляры в электронном исполнении. Им характерен довольно замысловатая последовательность в плане управления. Они способны контролировать периодичность вращений, совершаемых валом. Также учитывать нагрузку двигателя внутреннего сгорания. На основе этого, они подталкивают турбинный компрессор к созданию высокого давления за короткое время.
Несмотря на то, что мощность увеличивается, показатель будет незначительным. Чего не скажешь о тяжести на узлы движка, которая моментально возрастает. Можно сказать, что установка буст контроллера целесообразна для автомобилей, участвующих в соревнованиях. Поэтому не рекомендуется ставить его на штатный мотор. Ему просто не под силу такая нагрузка. Единственное, если доработать контракцию и заменить все прокладки.
Ежедневная эксплуатация буст контроллера сведена к бездействию. Что обусловлено давлением воздуха, который выдает турбина. Он ниже срабатываемого порога обычного клапана.
Устройства на микроконтроллерах
Каждый из видов контроллеров имеет свои периферические устройства, которые работают автономно, т. е. независимо от центрального ядра. После того как периферийное устройство выполнит свою задачу, оно может сообщить об этом ЦП, а может и не сообщать. Это зависит от того, как оно запрограммировано.
На МК могут быть следующие устройства:
- Аналоговый компаратор. Основная его задача сравнивать поступающее (измеряемое) напряжение с идеальным. Если измеряемое напряжение выше, чем идеальное, то компаратор выдает сигнал логической 1 (прибор отключается), если ниже, то логический 0 (прибор продолжает работать).
- Аналогово-цифровой преобразователь (АЦП). Измеряет аналоговое напряжение в период времени и выдает его в цифровой форме. Есть не у всех МК.
- Таймер/счетчик. Представляет собой сочетание 2-х форм таймера и счетчика. Таймер формирует интервалы времени, а цифровой счетчик считает количество импульсов, идущих от внутреннего генератора частот, или сигналы от внешних источников. Одним из представителей работы таймера /счетчика может быть ШИМ (широтно-импульсный модулятор). Он предназначен для управления средним значением напряжения при нагрузке.
- Сторожевой таймер. Его задача перезапускать программу через определенный временной промежуток.
- Модуль прерываний. Он сообщает МК о наступлении какого-либо события и прерывает выполнение программы. После завершения события возобновляет прерванную программу.
Не все из этих периферийных устройств обязательно есть в каждом МК. Существуют и другие, менее распространенные устройства.
Типы ПЛК
Все ПЛК, выпускаемые Schneider Electric, Mitsubishi, Beckhoff, Omron, Segnetics или Unitronics, четко разделяются по типам. Это же относится к классификации российской продукции, представленной компаниями «Овен», «Контар», «Текон» и другими. Конструктивно устройства принято обозначать как моноблочные и модульные.
В первом типе содержится полный набор входных, выходных цепей, процессор, источник энергии. Во втором предусмотрена сборка готового ПЛК из отдельных частей. Согласно МЭК 61131, количество и состав модулей варьируются в соответствии с назначением, характеристиками поставляемого заказчику устройства.
Модульный микроконтроллер может управлять посредством Ethernet соединения малопроизводительным собратом, выполняющим специфично назначенные функции (диагностика состояния периметра, безопасность охраняемой зоны). Маломощный адаптер питания в этом случае является отдельным модулем. Обобщенно функциональные возможности второго вида превосходят первый. Но в отдельных ситуациях (микроконтроллер управления чайником Berghof) достаточно моноблочного ПЛК.
Главное достоинство такой конструкции — компактность. При этом полностью завершенная конструкция платы, блока контроллера оборудуется дисплеем и устройством ввода-вывода, кнопочной панелью. Типичный пример — «умный» автоматный моноблок, отвечающий за стабилизацию напряжения.
Из нескольких ПЛК, смонтированных на стандартную рейку, набирается укрупненный узел управления. Первоначально конфигурация микроконтроллеров подразумевала замену существовавших релейных, полупроводниковых схем. Со временем задачи усложнились, но и сохранившиеся ограниченно производительные 8 и 16 разрядные процессоры по-прежнему востребованы в промышленности.
разница написания КОНТРОЛеР и КОНТРОллЕР? Как понять?
с двумя никогда не встречала, может ошибочка вышла
В первом слове ударение на последнем слоге,<br>а во втором слове- на втором слоге.<br>Значения второго слова я не знаю.
КонтрОллер — это технический термин, устройство такое. Контроллер дисковода например. Служит для.. . ну скажем «контроля» работы устройства.
КонтроЛЁр, 1) лицо, занимающееся проверкой чего-либо.-2) Должностное лицо в государственном контроле, акцизе, на железн. дорогах и в друг. учреждениях…<br><br>*КонтроЛЛЕр (англ. controller, буквально — управитель), электрический аппарат низкого напряжения, предназначенный для пуска, регулирования скорости, реверсирования и электрического торможения…<br><br>*КонтроЛЛЕр — в компьютере специализированный процессор для управления внешними устройствами — накопителем, монитором, принтером и т. д…
Разницу понять очень просто. Английское слово «controller» имеет, как Вы заметили, две буквы «л». Однако при переводе на русский язык количество букв «л» меняется. Различают при этом два случая:<br>1) Если речь идёт об инспекторе, ревизоре, т.е. человеке-проверяющем, то пишут одну букву «л»: контролёр, и ударение стаят на последнем слоге: контролЁр.<br>2) Если же речь идёт о ТЕХНИЧЕСКОМ устройстве (регулятор, орган управления ), то пишут с двумя «л» и ударение ставят на втором слоге: контрОллер.
Контролер — лицо,обязанность которого является контроль,проверка чего-либо. Контроллер — Электрический аппарат низкого напряжения,предназначенный для пуска,останова,регулирования частоты вращения электродвигателей.
С двумя — это термин из IT.
Так называют устройство.
Контролер это говнюк в Сталкере, а контроллер, ударение е это плата, в механизмах из Сталкера и не только.
Не следует путать с контролёром.
Контро́ллер (англ. controller — регулятор, управляющее устройство):
Контроллер — устройство управления в электронике и вычислительной технике.
Игровой контроллер — устройство ввода информации, используется в консольных и компьютерных играх.
Контроллер домена — сервер, контролирующий область компьютерной сети (домен).
Контроллер прерываний — микросхема или встроенный блок процессора, отвечающий за возможность обработки запросов на прерывание от разных устройств.
Контроллер электрического двигателя — многоступенчатый многоцепной коммутационный аппарат с ручным управлением.
Микроконтроллер — микросхема, управляющая электронными устройствами.
Промышленный контроллер — управляющее устройство, применяемое в промышленности и других отраслях для автоматизации технологических процессов, в быту — для управления климатом и др.
Программируемый логический контроллер — промышленный контроллер, оптимизированный для выполнения логических операций.
Системный контроллер — компонент чипсета, организующий взаимодействие процессора с оперативной памятью и формирующий компьютерную платформу.
Контроллер машиниста — орган управления тягой и/или торможением в локомотивах, электропоездах, трамваях
Контроллер — то же, что и регулятор.
Контроллер (программирование) — один из компонентов паттерна MVC.
Контроллер — электронный блок управления двигателем и другими системами автомобиля.
Контролёр:
Контролёр — лицо, осуществляющее контроль оплаты проезда в наземном транспорте.
Контролёр — надзиратели СИЗО и мест лишения свободы в СССР и РФ в 1960—1990-е годы.
Государственный контролёр — должность во Временном правительстве России в период между Февральской и Октябрьской революциями.
Контролёр — мутант в серии компьютерных игр «S.T.A.L.K.E.R.», способный брать под телепатический контроль другие живые существа.
Контролёр пришельцев — вид пришельца в серии компьютерных игр Half-Life.
Контролёр универмага (англ. The Floorwalker) — короткометражный фильм, США, 1916 год. Режиссёр — Чарльз Чаплин.
Контролёр сварочных работ — лицо, занимающиеся определением (оценкой) соответствия установленным требованиям выполненных сварочных работ и объекта (сварной конструкции) при производстве и в период эксплуатации (Приказ Минтруда России от 01.12.2015 N 908н)
Установка драйвера на сетевую карту в Windows 10, 8, 7
Если на ноутбуке, компьютере установлена система Windows 7, 8, 10, первым делом стоит найти драйвер в сети. Когда ПК известно его местоположение, устройство способно обновить данные в автоматическом режиме. В операционных системах Windows 7, 8 необходимо просмотреть информацию через диспетчер устройств.
Важно! Windows 10 дает возможность сразу перейти в центр обновления оборудования и выбрать нужный пункт
Обновляем драйвер вручную (если нет файла setup.exe)
В ноутбуке, компьютере есть инструменты для ручной установки драйвера. В свойствах сетевой карты отображены сведения о последних обновлениях План действий:
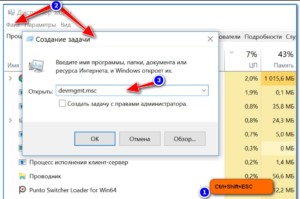
- Комбинация Win+R.
- Выбор devmgmt.msc.
- Кнопка Enter.
- Поиск адаптера.
- Переход в ИД оборудования.
- Просмотр сведений.
- Выбор значения.
- Кнопка «Обновить».
Что это такое?
Это очень маленькая микросхема, которая припаяна к плате вашего мобильного телефона, обычно рядом с разъемом для зарядки. Для чего нужен контроллер питания?
Он регулирует процесс подачи электрического тока к батарее вашего мобильного устройства и, как правило, достаточно технологичен, чтобы определить, например, что ваш телефон уже полностью заряжен. В таком случае процесс подачи энергии просто останавливается, а на дисплее смартфона появляется надпись, которая сообщает о том, что аккумулятор вашего устройства заряжен. Возможно, он также предохраняет ваш аппарат от зарядных устройств более высокого напряжения, не давая смартфону выйти из строя.
Гироскоп и акселерометр полетного контроллера
Гироскоп и акселерометр — очень важные датчики, они определяют положение квадрокоптера в пространстве, а также движется ли он, посылают эти данные процессору, а тот уже решает, какому двигателю поддать газа, а какому наоборот, снизить обороты.
Акселерометр выполняет роль стабилизатора в пространстве, есть даже такой режим полета — «Режим стабилизации», при котором квадрокоптер невозможно будет перевернуть в воздухе и он всегда будет держаться параллельно земле (если просто отпустить стики на пульте). Опытные пилоты почти всегда летают в режиме АКРО, поэтому они отключают акселерометр или используют его крайне редко.
Гироскоп же выполняет роль определения положения квадрокоптера в пространстве.
Какие самые популярные гироскопы используются в полетных контроллерах? Смотрим таблицу ниже:
| Гироскоп | Протокол коммуникации (BUS) | Макс. частота работы гироскопа |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 и тоже с магнитометром.
Номер и название гироскопа можно найти на самом чипе, например это — MPU-6000:
Выбор гироскопа: частота опроса и шумы
Есть два критерия, которые нужно учитывать при выборе полетного контроллера с конкретным гироскопом, это частота работы и чувствительность к шумам (электро- и механическим).
На сегодня самыми популярными и надежными считаются гироскопы MPU6000, у них частота работы 8KHz, а также они достаточно не чувствительны к шумам. Советуем не покупать полетные контроллеры с гироскопами MPU6500 и MPU9250, у них хоть и частота выше, но они больше подвержены воздействию шумов.
Серия гироскопов ICM работает лучше и плавнее, чем MPU6000 на 32KHz, но из-за шумных двигателей и регуляторов оборотов производительность ICM будет ниже, чем MPU6000. Например, ICM20602 на Raceflight Revolt V2 или ICM20689 на Kakute F4, оба этих гироскопа могут работать на частоте 32KHz, но с регуляторами оборотов, которые генерируют много шума, они работать будут хуже, чем MPU6000. По этой причине на полетные контроллеры устанавливают сетевые фильтры для частичного удаления шумов.
i2c и SPI
SPI и i2c — это протоколы связи (BUS) между процессором и гироскопом . В зависимости от того, какой будет протокол, будет зависеть скорость работы самого гироскопа. Гироскоп сможет работать на частоте 32KHz с протоколом SPI, в то время как на i2c можно рассчитывать на «потолок» в 4 KHz. Поэтому выбирайте ПК с SPI.
Типы корпусов микроконтроллеров
Внешних отличий МК от других микросхем нет. Кристаллы размещены в корпусах с определенным количеством выходов. Все МК выпускаются только в 3-х типах корпусов:
- Корпус DIP имеет два ряда выводов. Расстояние между ними 2,54 мм. Выводы вставляются внутрь отверстий на контактных площадках.
- Корпус SOIC. Он подходит для монтажа, который предполагает поверхностную припайку выходов к контактной площадке. Расстояние между выходами 1,27 мм.
- Корпуса QFP (TQFP). Выводы расположены со всех сторон. Расстояние между ними в 3 раза меньше, чем в DIP. Корпус имеет квадратную форму. Предназначаются только для поверхностной пайки.
- Корпус QFN. Самый маленький по сравнению с предыдущими. Контакты выходят в 6 раз чаще, чем в DIP. Имеют большое распространение в промышленном производстве, т. к. позволяют значительно уменьшить габариты выпускаемых приборов.
Каждый из корпусов имеет свои точки применения. Первые 3 могут использоваться радиолюбителями.
Виды контроллеров
Для светодиодов
в РГБ-ленте применяют несколько модификаций контроллеров. При этом они могут
различаться между собой по нескольким признакам:
- Внешнему исполнению. Блок управления оснащается защитой от внешних факторов, либо нет.
- Типу монтажа. Корпус устройства содержит либо специальные отверстия под шурупы, либо включает рейку (для установки в электрощиток), либо другие системы крепежа.
- Методу управления. Оснащаются как простейшей системой – кнопками, так и более усовершенствованными – радиочастотными пультами или через WiFi-сеть со смартфона.
По виду системы
управления контроллеры для светодиодных лент могут иметь следующие модификации:
- Без пульта.
- С ПДУ на кнопках.
- Пульт с
сенсорным экраном. - Со встраиваемыми
сенсорными дисплеями. - «Умные» контроллеры.
Максимальной
функциональностью отличаются модели с пультом на сенсорном экране или с кнопками. При этом для
передачи сигнала они оснащаются ИК-портом или радиочастотным модулем. Первые
требуют определенной направленности в пространстве для выполнения команд,
вторые – могут располагаться в любом месте, даже за стеной.
По внешнему оформлению пульты
разделяются на три модификации:
- Кнопочные.
- Сенсорные. На
панели имеется кольцо и несколько клавиш для выполнения различных функций. - Стационарные. В
отличие от вышеописанных типов устройств данная модификация устанавливается на
стену в подрозетник либо на подставку на рабочий стол.
Современные модели
пультов для контроллеров светодиодных лент позволяют выполнять следующие
операции:
- Включать и отключать RGB-ленту.
- Настраивать яркость (функция диммера включена).
- Задавать оттенки цвета.
- Создавать программы интенсивности, времени изменений свечения в том или ином спектре.
Если многоцветная подсветка состоит из комплекта светодиодных лент для различных зон с разными задачами, лучше воспользоваться более функциональными аудио- и Смарт-контроллерами. С их помощью можно задавать самой различной сложности программы управления и обеспечить эффект цветомузыки.
Языки программирования ПЛК
Для программирования ПЛК используются стандартизированные языки МЭК (IEC) стандарта IEC61131-3
Языки программирования (графические)
- LD (Ladder Diagram) — Язык релейных схем — самый распространённый язык для PLC
- FBD (Function Block Diagram) — Язык функциональных блоков — 2-й по распространённости язык для PLC
- SFC (Sequential Function Chart) — Язык диаграмм состояний — используется для программирования автоматов
- CFC (Continuous Function Chart) — Не сертифицирован IEC61131-3, дальнейшее развитие FBD
Языки программирования (текстовые)
- IL (Instruction List) — Ассемблеро-подобный язык
- ST (Structured Text) — Паскале-подобный язык
- C-YART — Си-подобный язык (YART Studio)
Структурно в IEC61131-3 среда исполнения представляет собой набор ресурсов (в большинстве случаев это и есть ПЛК, хотя некоторые мощные компьютеры под управлением многозадачных ОС представляют возможность запустить несколько программ типа softPLC и имитировать на одном ЦП несколько ресурсов). Ресурс предоставляет возможность исполнять задачи. Задачи представляют собой набор программ. Задачи могут вызываться циклически, по событию, с максимальной частотой.
Программа — это один из типов программных модулей POU. Модули (POU) могут быть типа программа, функциональный блок и функция.
В некоторых случаях для программирования ПЛК используются нестандартные языки, например:
Блок-схемы алгоритмов
С-ориентированная среда разработки программ для ПЛК.
HiGraph 7 — язык управления на основе графа состояний системы.
Инструменты программирования ПЛК на языках МЭК 61131-3 могут быть специализированными для отдельного семейства ПЛК или универсальными, работающими с несколькими (но далеко не всеми) типами контроллеров:
- CoDeSys
- ISaGRAF
- ИСР «КРУГОЛ»
- Beremiz
- KLogic